半導體自動化
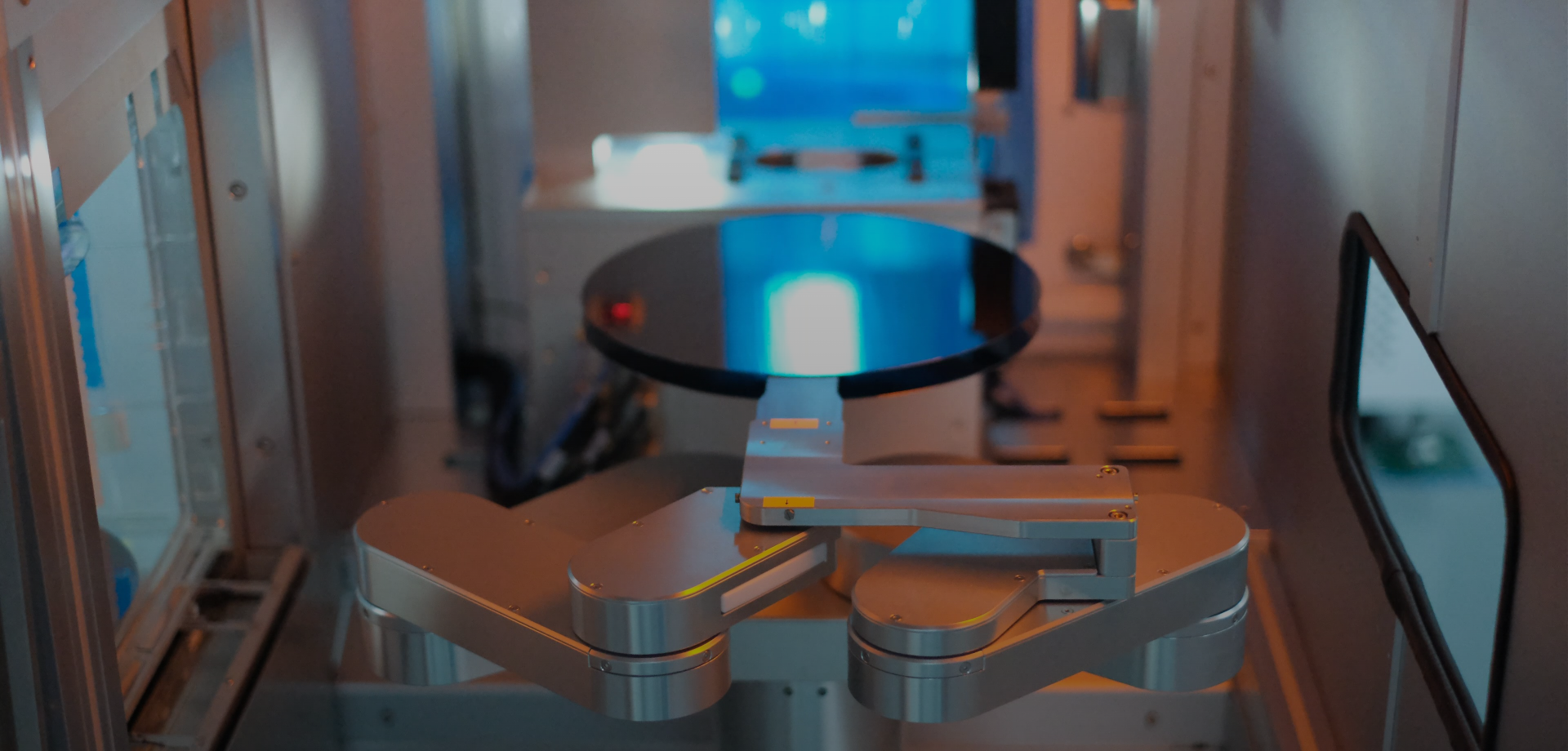
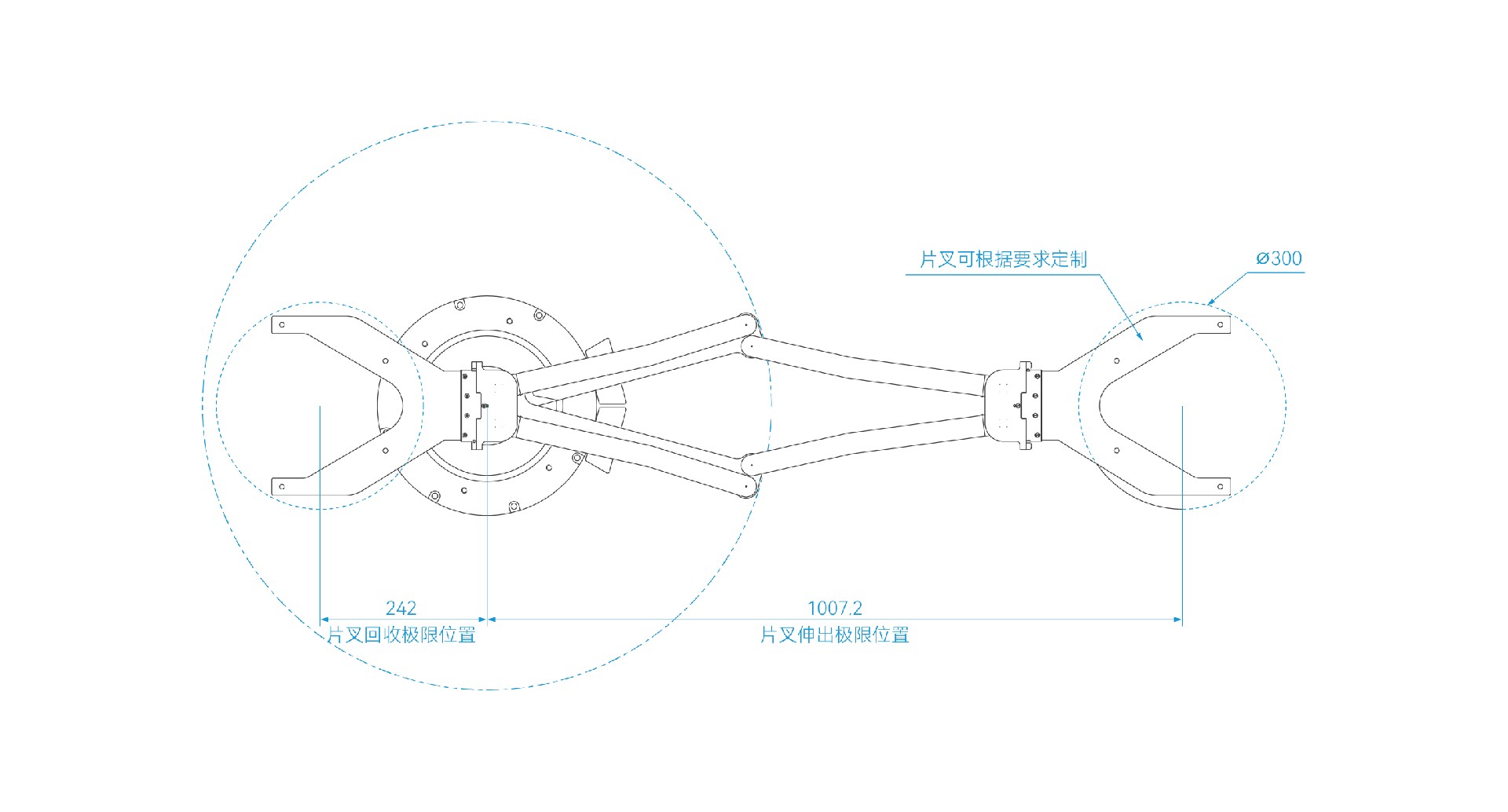
作為晶圓的真空傳輸系統中的基板搬運機器人,XIVI的真空機械手的全連桿手臂機構可實現更高的定位精度。采用全閉環控制方式,搭載真空直驅電機,擁有更高的回轉精度與更快的響應時間,雙向雙臂的配置,可以在不擴大腔室的情況下比傳統型號傳輸更長的距離,且面對多工位,擁有更高的工作效率。當需要在高真空環境中以經過驗證的精度和可重復性傳輸基板時,XIVI的真空機械手實現了高定位重復性和高可靠的真空分區性能。